THEORY
The moving-coil part of any speaker has a nonzero rest mass, which means it will have an inertia. This is clearly seen on the impulse response of the speaker. Impulse response of a dynamic system is its output when presented with a brief input signal, called an impulse. Below is the typical impulse response of a 5" full-range speaker.

It is seen that the speaker diaphragm cannot instantly reach its maximum when a pulse is applied to the amplifier input. It also cannot instantly stop after the end of the impulse, jumping down through zero and performing regular oscillations, similar to oscillations of a damped pendulum.
We can say that there is a time delay in the signal and, as a consequence, distortion of the frequency response. Since the shape of the impulse response is not symmetrical, the phase response of the system will also be nonlinear.
Loudspeaker Frequency Response

Loudspeaker Phase Response
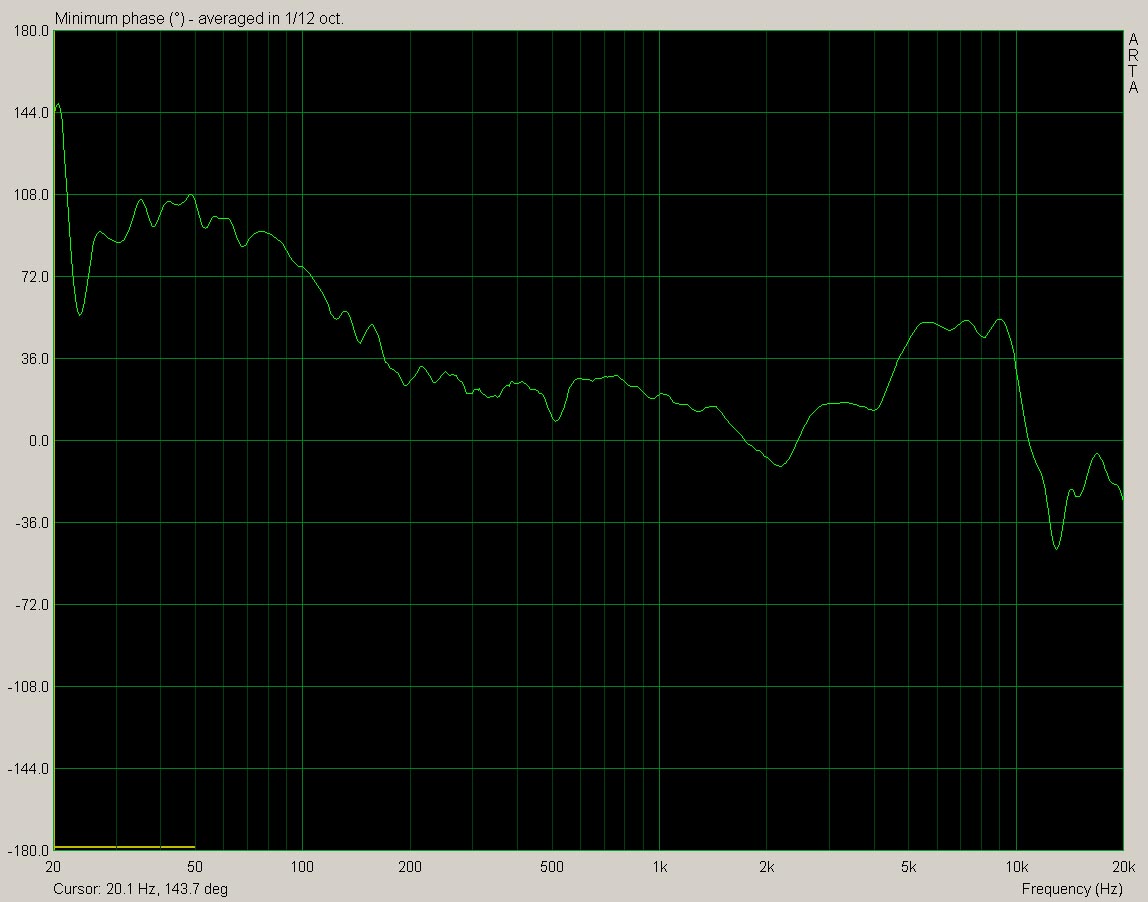
Distortions of the frequency response lead to additional coloration of the sound and distortion of the timbre balance, phase-response distortions lead to the destruction of spatial localization (the sound becomes "flat" and "comes out of the speakers").
It is impossible to mechanically correct this shortcoming of the speaker design, since the diffuser will always have a non-zero rest mass. In part, the problem can be solved by filtering the signal in front of the speaker. With the development of digital signal processing, such systems are widespread. Their common disadvantage is that they only linearize the frequency response of the speaker. This is a fairly simple task, but it leads to even greater distortion of the phase response and, as a rule, all such systems lose in spatial representation of sound.
The frequency-phase compensation system developed by DMAX Audio linearizes not only the frequency response, but also the phase response. The main difficulty is that there is no unambiguous method for calculating a short FIR filter that would solve the problems of linearization of frequency response and phase response with 100% accurate result. But there are methods for calculating filters that solve these problems via approximation with a small error.
Below is the impulse response of the original speaker combination
and the specially designed FIR filter.

The Result Frequency response.

The Result Phase response.
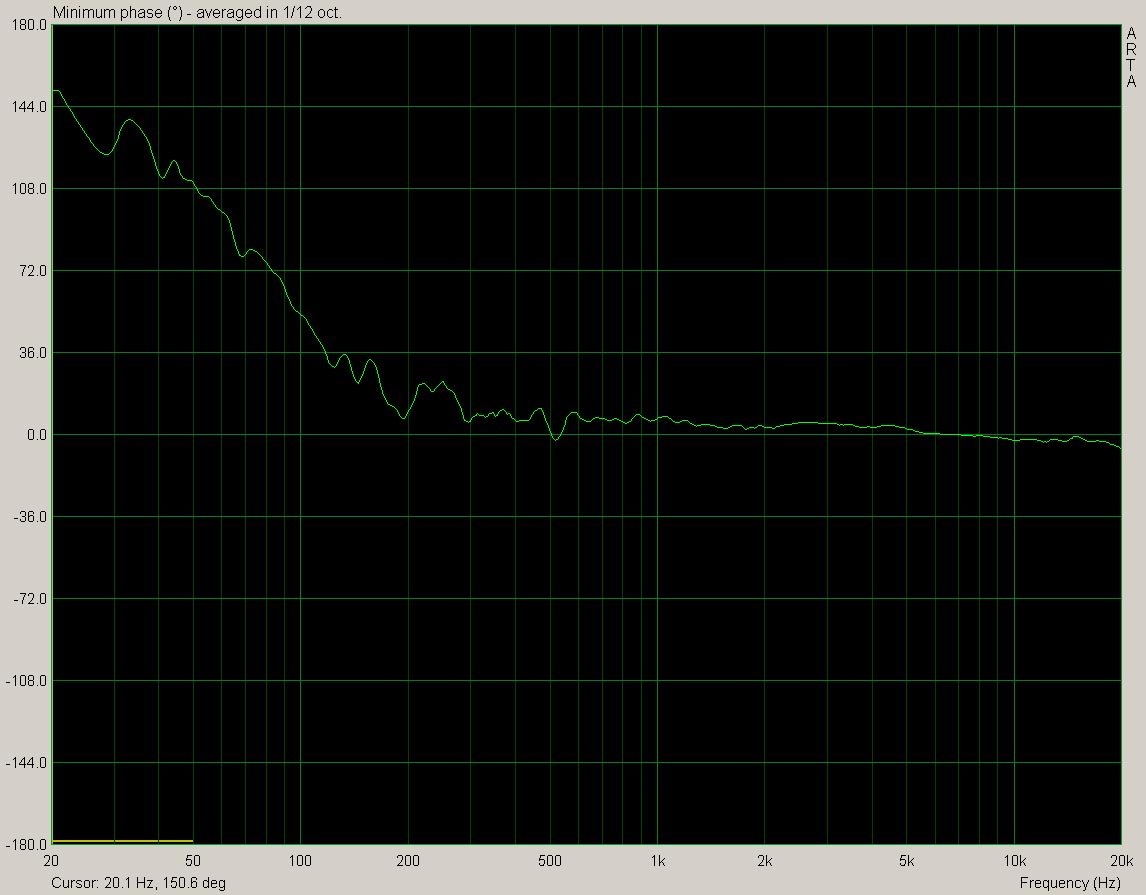
The total impulse response is a delta function + fading error signal with a level not exceeding -40db. Physically, such a filter "cancels" the inertia of the speaker. It goes without saying that inertia does not go away, but the result looks exactly like it actually disappeared.
It goes without saying that inertia does not go away, but the result looks exactly like it actually disappeared. With phase-frequency compensation technology, speakers with very linear amplitude-frequency and phase-frequency characteristics.
Although the technology is best suited for linearization of the parameters of full-range speakers, it can be successfully used to create two or more band acoustic systems.
All monitors manufactured by DMAX Audio operate according to the active amplification scheme with a processor built into the amplifier (Analog Devices). Due to the use of a specialized DSP processor, the FIR filter is calculated with a minimum delay in the range of 5ms.